Bir makinenin prosesinde son kontrol elemanı görevi gören sistem servo sistemleri olmaktadır. Motorlar genellikle güç elde etmeye çalışan parçalardır ve sabit hızlarda dönmeye göre tasarlanmışlardır. Fakat servo motorlar diğer motorlara göre biraz daha farklıdır. Servo motorlar farklı hız ve torklarda istenilen komutu yerine getirilebilmesi amacı ile tasarlanmış motorlardır. Böylece kullanıcılar isteklerine göre bu motorları hız, tork ve pozisyon olarak kontrol edebilme imkanına sahiplerdir.
Mekanizmalarda bulunan açı ve doğrusal pozisyon ile hız ve ivme kontrolünü hatasız olarak yapan tahrik sistemi servo motor şeklinde tanımlanmaktadır. Bu motorlar hareket kontrolü yapan bir düzenek olmaktadır. Robot teknolojisinde en çok kullanılan motor çeşidi servo motorlar olmaktadır.

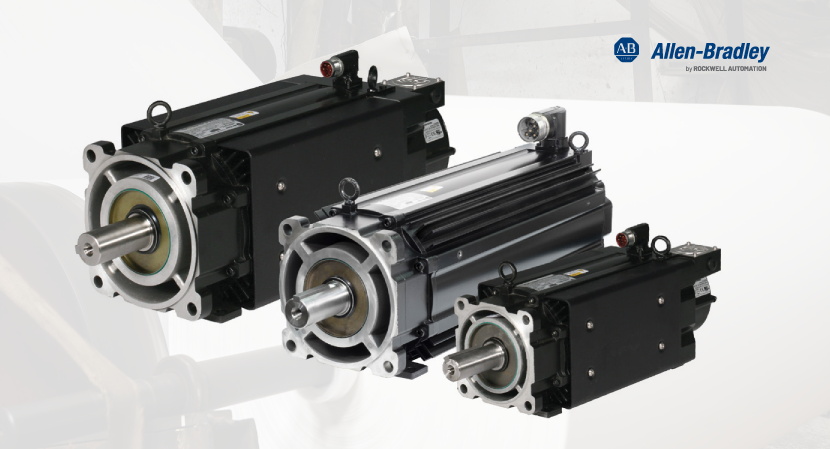
Kinetix VPC fansız servo motor. IE5 enerji verimliliğini sağlar ve hava oluşumundan kaçınmanız gereken (baskı gibi) uygulamalar için mükemmeldir.
Servo Motorların Avantajları Nelerdir?
Günümüzde diğer motorlara göre servo motorların pek çok avantajı bulunmaktadır. Buna göre servo motorların avantajları şu şekilde sıralanabilir:
– Pozisyon bilgilerini sürekli takip edebilmektedir.
– Devir sayılarını düzgün ve hızlı bir şekilde değiştirebilmek mümkündür. Böylece servo motorlar küçük boyutlarda büyük momentler de elde edebilmektedir.
– Servo motorlar sık aralıklar ile farklı hareketleri gerçekleştirebilmektedir. Bu nedenle dur kalk sayıları da daha fazla olabilir. Fakat dur kalk sayılarının fazla olması motor için önemli bir etken değildir. Bu sayede servo motorlar da olumsuz etkilenmezler.
– Servo motorların motor atalet momentleri küçük ve aldıkları komutları anlık bir şekilde uygular.
Servo Motorların Çalışma Prensibi
Servo Motor, bir DC Motor, bir Dişli sistemi, bir konum sensörü ve bir kontrol devresinden oluşur. DC motorlar bir bataryadan güç alır ve yüksek hızda ve düşük torkta çalışır. DC motorlara bağlı Dişli ve şaft grubu bu hızı yeterli hıza ve daha yüksek torka düşürür. Konum sensörü, milin konumunu kesin konumundan algılar ve bilgiyi kontrol devresine besler. Kontrol devresi buna göre pozisyon sensöründen gelen sinyalleri çözer ve motorların gerçek pozisyonunu istenen pozisyonla karşılaştırır ve buna göre gerekli pozisyonu elde etmek için DC motorun dönüş yönünü kontrol eder.